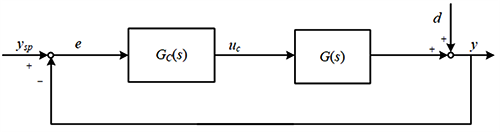
PI控制器可以消除余差,根本原因是在閉環(huán)中增加了一個原點極點,將閉環(huán)系統(tǒng)從0型系統(tǒng)升級為1型系統(tǒng)。關(guān)于如何設(shè)置積分時間,一般的說法是積分時間大,積分作用弱,消除余差速度慢;積分時間小,積分作用弱,消除余差速度快。那么到底應(yīng)該如何設(shè)置積分時間呢?PI控制器同時還增加了一個零點,可以消除被控對象的時間常數(shù)對閉環(huán)系統(tǒng)的影響,這一點一直沒有被充分重視。
對PI控制器的傳遞函數(shù)進行變換和重構(gòu),有助于理解如何設(shè)置積分時間。根據(jù)下面的公式變換后,可以把PI控制器看作比例環(huán)節(jié)、積分環(huán)節(jié)和PD環(huán)節(jié)的組合。比例環(huán)節(jié)中的積分時間,可以看作比例作用的一部分,通過設(shè)置合適的比例增益就能對沖,并不需要特別關(guān)注。
在PD環(huán)節(jié)中,積分時間被變換成微分時間了。如何設(shè)置積分時間就和對PD環(huán)節(jié)的要求有關(guān)了。

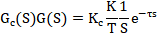
要想整定方法獲得閉環(huán)性能一致,最關(guān)鍵就是要把被控對象特性的影響對消掉。模型的增益可以用比例增益對消,純滯后環(huán)節(jié)是不可對消的。從下面的公式可以看出設(shè)置積分時間等于時間常數(shù)可以讓問題變得簡單。

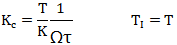
積分時間等于時間常數(shù)后,被控對象時間常數(shù)對閉環(huán)系統(tǒng)的一階慣性影響就被對消了,開環(huán)傳遞函數(shù)就變成了下式。這時就進一步可以看出來,為了消除模型增益和模型時間常數(shù)的影響,比例增益應(yīng)該和模型時間常數(shù)成正比、和模型增益成反比了。
要想獲得一致的閉環(huán)性能,就要保證相位裕度的穩(wěn)定。此時針對不可對消的純滯后環(huán)節(jié)的最佳應(yīng)對就是比例增益和純滯后成反比。另外為了修改相位裕度就要提供一個可調(diào)的參數(shù),所以PI的整定規(guī)則就是下式。
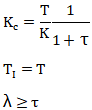
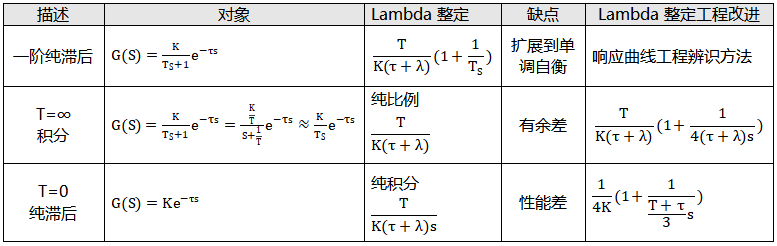
這個Ω的取值在頻率里有非常清楚的解釋,但是對工程師來說物理意義并不直觀,上面的公式可以進一步重構(gòu)為如下公式所示的Lambda整定。Lambda整定方法中的λ和純滯后有關(guān),代表了期望的閉環(huán)時間常數(shù)。工程上要求λ大于等于純滯后,將λ設(shè)置為純滯后時間的倍數(shù)既是為了方便工程化,也有理論上的考量。理論上并沒有這個要求。
再給上面的公式進行一系列工程改進和簡化,就構(gòu)成了Lambda工程整定方法的全部。
作者:馮少輝博士






